10.5 Searching Algorithms Revisited¶
Searching algorithms are used to search for one or a group of elements that meet specific conditions in data structures (such as arrays, linked lists, trees, or graphs).
Searching algorithms can be divided into the following two categories based on their implementation approach:
- Locating target elements by traversing the data structure, such as traversing arrays, linked lists, trees, and graphs.
- Achieving efficient element lookup by leveraging the way data is organized or prior information about the data, such as binary search, hash-based search, and binary search tree search.
As these topics have already been introduced in earlier chapters, searching algorithms should already be familiar to us. In this section, we revisit them from a more systematic perspective.
10.5.1 Brute-Force Search¶
Brute-force search locates target elements by traversing each element of the data structure.
- "Linear search" is applicable to linear data structures such as arrays and linked lists. It starts from one end of the data structure and accesses elements one by one until the target element is found or the other end is reached without finding the target element.
- "Breadth-first search" and "depth-first search" are two traversal strategies for graphs and trees. Breadth-first search starts from the initial node and searches layer by layer, visiting nodes from near to far. Depth-first search starts from the initial node, follows a path to the end, then backtracks and tries other paths until the entire data structure is traversed.
The advantage of brute-force search is that it is simple and has good generality, requiring no data preprocessing or additional data structures.
However, the time complexity of such algorithms is \(O(n)\), where \(n\) is the number of elements, so performance is poor when dealing with large amounts of data.
10.5.2 Adaptive Search¶
Adaptive search leverages properties of the data itself (such as sorted order) to optimize the search process and locate target elements more efficiently.
- "Binary search" uses the orderliness of data to achieve efficient searching, applicable only to arrays.
- "Hash-based search" uses hash tables to store searchable data as key-value pairs, thereby enabling efficient queries.
- "Tree search" operates on specific tree structures (such as binary search trees), quickly ruling out nodes by comparing node values to locate the target element.
The advantage of such algorithms is high efficiency, with time complexity reaching \(O(\log n)\) or even \(O(1)\).
However, using these algorithms often requires data preprocessing. For example, binary search requires pre-sorting the array, while hash-based search and tree search both require additional data structures, and maintaining these data structures also requires extra time and space overhead.
Tip
Adaptive search algorithms are often called lookup algorithms, mainly used to quickly retrieve target elements in specific data structures.
10.5.3 Search Method Selection¶
Given a dataset of size \(n\), we can use linear search, binary search, tree search, hash-based search, and other methods to search for the target element. The working principles of each method are shown in Figure 10-11.
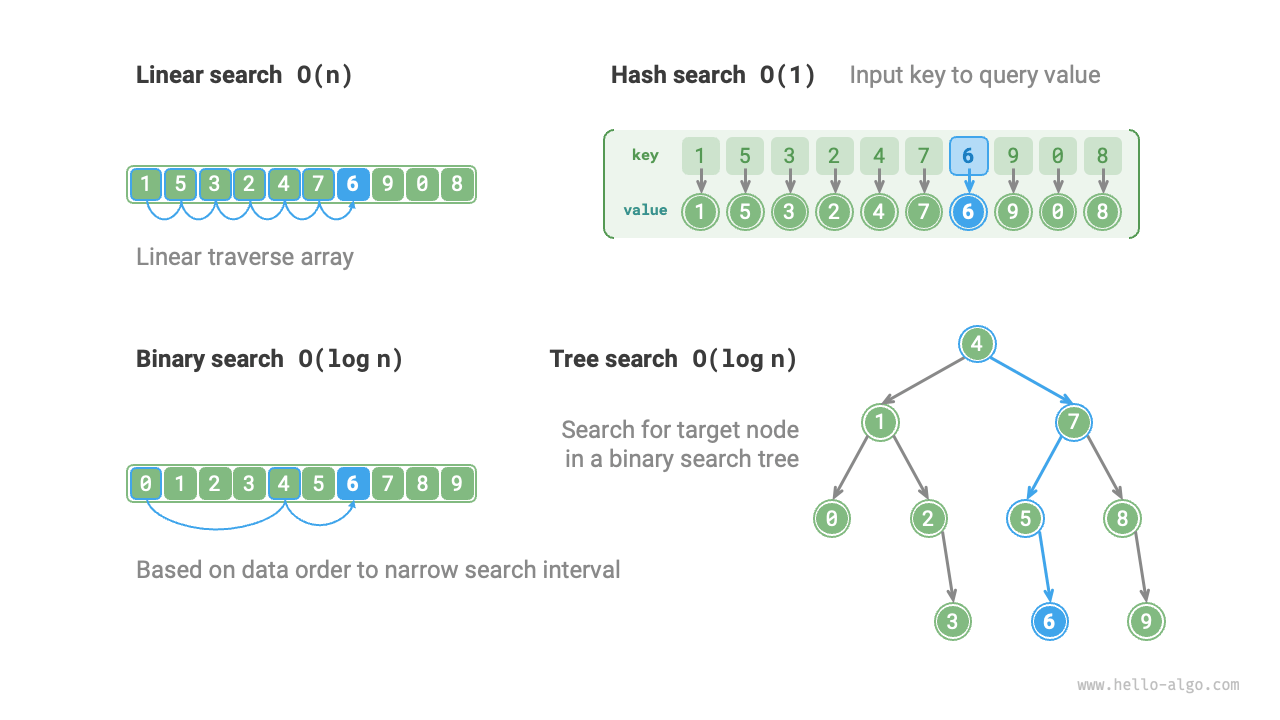
Figure 10-11 Multiple search strategies
The efficiency and characteristics of these methods are summarized in Table 10-1.
Table 10-1 Comparison of search algorithm efficiency
| Linear search | Binary search | Tree search | Hash-based search | |
|---|---|---|---|---|
| Search element | \(O(n)\) | \(O(\log n)\) | \(O(\log n)\) | \(O(1)\) |
| Insert element | \(O(1)\) | \(O(n)\) | \(O(\log n)\) | \(O(1)\) |
| Delete element | \(O(n)\) | \(O(n)\) | \(O(\log n)\) | \(O(1)\) |
| Extra space | \(O(1)\) | \(O(1)\) | \(O(n)\) | \(O(n)\) |
| Data preprocessing | / | Sorting \(O(n \log n)\) | Tree building \(O(n \log n)\) | Hash table building \(O(n)\) |
| Data ordered | Unordered | Ordered | Ordered | Unordered |
The choice of search algorithm also depends on data volume, search performance requirements, data query and update frequency, etc.
Linear search
- Good generality, requiring no data preprocessing operations. If we need to query the data only once, the preprocessing required by the other three methods can take longer than the linear search itself.
- Suitable for small data volumes, where time complexity has less impact on efficiency.
- Suitable for scenarios with high data update frequency, as this method does not require any additional data maintenance.
Binary search
- Suitable for large datasets, with stable performance and a worst-case time complexity of \(O(\log n)\).
- Data volume cannot be too large, as storing arrays requires contiguous memory space.
- Not suitable for scenarios with frequent data insertion and deletion, as maintaining a sorted array has high overhead.
Hash-based search
- Suitable for scenarios with high query performance requirements, with an average time complexity of \(O(1)\).
- Not suitable for scenarios requiring ordered data or range searches, as hash tables cannot maintain the data in sorted order.
- High dependence on hash functions and hash collision handling strategies, with significant risk of performance degradation.
- Not suitable for excessively large data volumes, as hash tables require extra space to minimize collisions and thus provide good query performance.
Tree search
- Suitable for massive datasets, as tree nodes are stored non-contiguously in memory.
- Suitable for scenarios that require maintaining ordered data or performing range searches.
- During continuous node insertion and deletion, binary search trees may become skewed, degrading time complexity to \(O(n)\).
- If AVL trees or red-black trees are used, all operations can consistently run in \(O(\log n)\) time, though maintaining tree balance adds extra overhead.